BeingM05
“可控性”
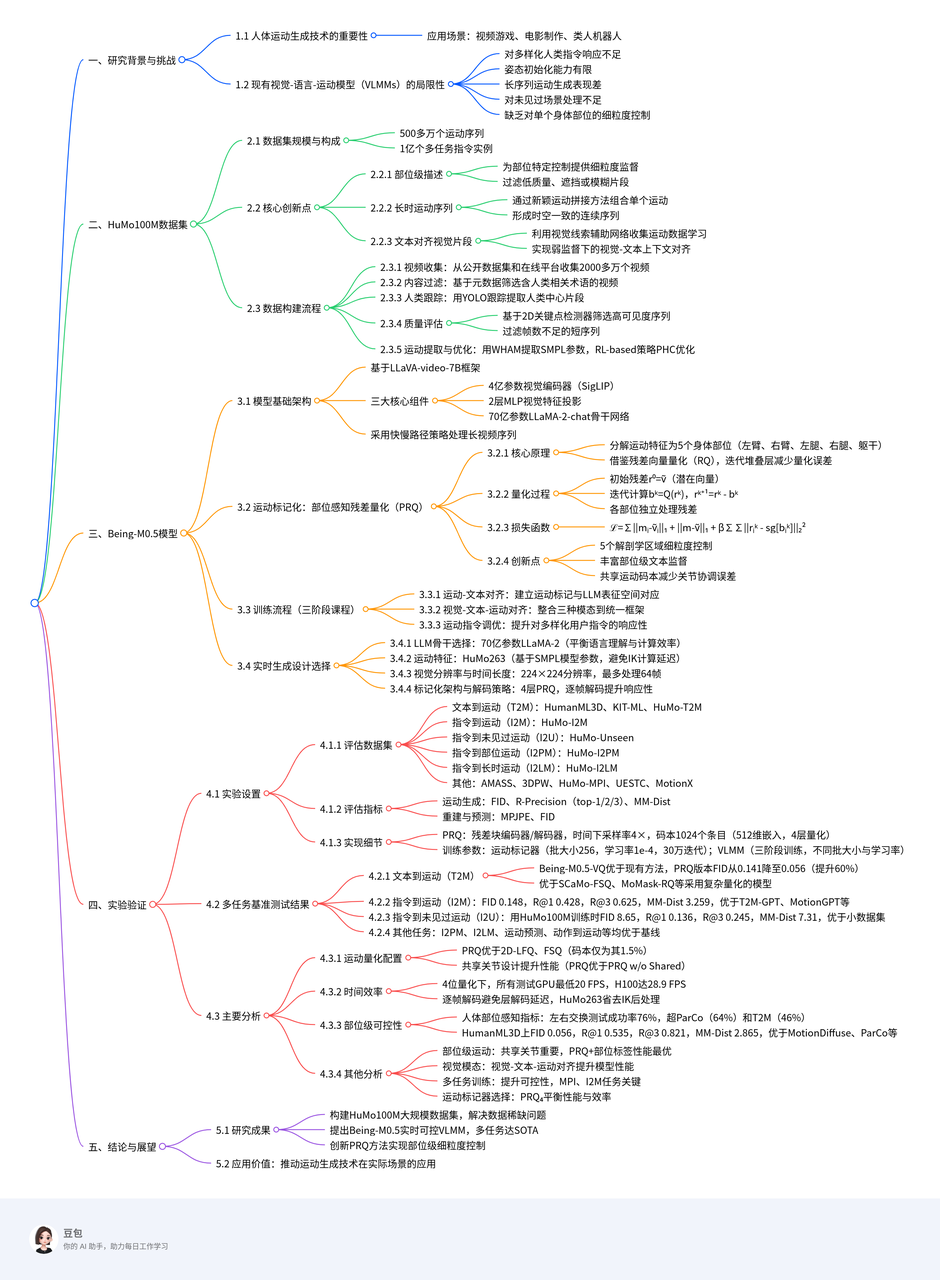
- 对多样化人类指令响应不足
- 姿态初始化能力有限
- 长时序列性能差
- 对未见场景处理不充分
- 缺乏对各个身体部位的细粒度控制。
HuMo100M,迄今为止规模最大、最全面的人体动作数据集,包含 500 余万条自主采集的动作序列、1 亿条多任务指令实例,以及详细的部位级标注,弥补了现有数据集的关键空白。
提出一种新颖的“部位感知残差量化”动作标记化技术,可在生成过程中对单个身体部位实现精准、细粒度的控制。 https://arxiv.org/pdf/2508.07863 https://beingbeyond.github.io/Being-M0.5 中科院自动化所
介绍
HuMo100M——迄今最大的动作生成数据集,包含 500 余万条动作序列和 1 亿条跨任务的指令实例。
- 部位级描述:为各身体部位提供细粒度监督,实现精确对齐,并过滤低质量、遮挡或模糊片段,提升数据可靠性;
- 长时动作序列:通过新颖的动作拼接方法,将单个动作组合成时空一致的连续序列,使 VLMM 能够生成超越短时片段的真实长时动作;
- 文本对齐视觉片段:不同于以往方法,我们利用视觉线索对网络采集的动作尤为重要,通过视觉-文本上下文对齐让 VLMM 在动作数据质量欠佳时仍能进行弱监督学习。
相关工作
人体动作生成
人体动作生成通常依据所采用的控制信号进行分类
- 文本描述
- 动作标签
- 关键帧姿态
- 不完整动作片段。
- 早期的确定性文本到动作(T2M)方法往往产生模糊或不真实的结果 ;
- 随后引入 VAE 与 GAN 等随机技术来缓解这一问题。
- 近年来
- MotionGPT 等代表性工作将大语言模型(LLM)融入动作生成,以更好理解人类意图并生成更贴合语境的动作;
- MotionChain 进一步支持多轮对话式动作生成;
- MotionLLM 则提供了统一的动作理解、字幕生成与推理框架。
- LMM 以及近期多模态方法探索了以人为中心的视频理解,以增强动作生成能力。
尽管取得诸多进展,现有研究往往忽视动作生成可控性的关键环节,且难以在模型性能与计算效率之间取得平衡,特别是在实时应用场景。
动作标记化
高效的动作表征是高质量生成的关键
- 向量量化(VQ)为鲁棒的人体动作编码奠定了基石。
- 用于迭代细化的残差量化(RQ)
- 多尺度表征的层级量化(HQ)
- 高效的无查找量化(LFQ)
- 增强表达力的有限标量量化(FSQ)。
同时,学界开始探索部位级动作标记化以实现更细粒度的控制:
- 部分方法将身体划分为上下两段
- 另一些则聚焦身体与手部等特定部位。
这些方法普遍缺乏对四肢的独立控制能力,也缺少相应的文本标注与评估基准。
方法
Being-M0.5(7B),在 500 万条人体动作序列和 1 亿条动作指令实例上训练。
模型
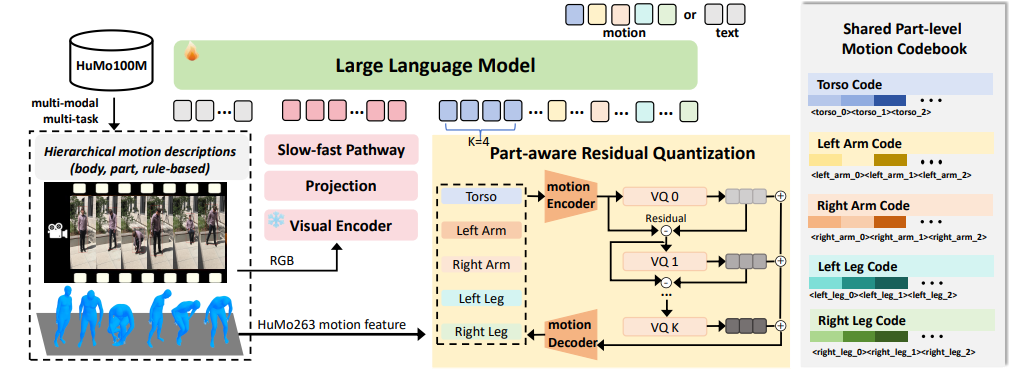
基于 LLaVA-video-7B 框架。
- 4 亿参数视觉编码器(SigLIP);
- 2 层 MLP 用于视觉特征投影;
- 70 亿参数的 LLaMA-2-chat 主干。
采用“慢-快”策略高效处理长视频序列。
模型将人体动作视为一种结构化语言,拥有自身的“词汇”与“语法”。给定动作序列 ,其中 表示 D 维动作特征向量, 为序列长度,我们使用动作标记��器
将连续动作数据量化为离散 token。
- 在基础 VLM 词表中新增 K 个动作专用码;
- 引入特殊边界 token <MOT> 与 </MOT> 以界定文本中的动作序列范围。
每条训练样本均遵循指令跟随格式 ,表示用户-VLMM 对话对。我们从网络视频中整理成对的、交错的视觉、语言与动作数据,支持文本到动作生成、动作预测、多模态动作理解等多样任务。给定查询 XQ,VLMM 生成响应 ,其中每个 可以是文本 token 或动作码。
训练采用三阶段:
- 动作-文本对齐:将动作 token 映射到 LLM 表征空间;
- 视觉-文本-动作对齐:把三种模态整合进统一框架;
- 动作指令微调:提升模型对多样化用户指令的响应性与可控性。
可控动作生成
从五个维度定义“可控性”,并通过系统化数据策划与专项指令任务设计来培养这些能力。
- 随机指令控制:现有 VLMM 处理任意用户指令的能力有限,难以落地。通过构建大规模指令模板库(如“请演示 <CAPTION> 动作”,<CAPTION> 为动作描述)并引入 Instruct-to-Motion(I2M)任务,显著提升指令响应性。
- 随机姿态初始化控制:实用 VLMM 应能从任意初始姿态生成连贯动作,而非局限于 T-pose 等固定配置。由于训练数据多样性不足,当前模型在此表现欠佳。我们设计 Motion Prediction and In-between(MPI)任务:随机从动作序列中抽取前段、中段或后段,让模型补全其余部分。实现该任务需百万级数据,这促使我们构建 HuMo100M。
- 长时动作控制:人类活动通常表现为连续、无缝的长序列。实用 VLMM 也应能生成扩展动作,而非孤立片段。利用 HuMo100M 中的拼接长序列,提出 Instruct-to-LongMotion(I2LM)任务,实现时序一致的长动作生成。
- 未见动作控制:现有数据集规模不足以确保对训练中未见的新动作模式稳健泛化。我们通过大规模网络视频采集与多任务训练设计扩大数据覆盖。凭借 HuMo100M 前所未有的规模(数百万动作实例),模型在未见动作上表现出强泛化能力。引入 Instruct-to-Unseen(I2U)任务系统评估该泛化性能。
- 随机部位控制:高阶 VLMM 应能对特定解剖区域进行精确控制(如“用左腿踢”或“挥右手”)。先前方法因缺乏部位级监督而难以实现,即使采用部位感知编码器也无济于事。借助 HuMo100M 的详尽部位级标注,提出 Instruct-to-PartMotion(I2PM)任务,要求模型在保持整体动作连贯与真实的前提下,生成指定身体部位的动作。
数据构建

-
视频收集与初步过滤:首先从公开数据集与在线平台收集超过 2000 万条视频,通过分析视频元数据,筛选出文本描述中包含“人(people)”“人类(human)”“个人(person)”等人类相关术语的内容,初步排除无关视频,实现大规模数据的快速筛选。
-
人类跟踪与片段提取:针对初步筛选后的视频,采用 YOLO 目标跟踪算法对视频中的每个人进行全程监测,精准识别并提取以人类为核心的视频片段;随后根据跟踪结果对视频进行分割,确保提取的运动数据是连续、时空一致的人类活动序列,避免碎片化或中断的运动片段混入。
-
质量评估与过滤:为解决实际视频中常见的遮挡、运动模糊及短序列信息不足问题,设计双重质量评估机制:
- 基于预训练 2D 关键点检测器提取人体骨骼标记点,以高置信度关键点的数量为核心指标,过滤可见关键点数量低于预设阈值的高遮挡序列;
- 通过序列长度过滤机制,移除帧数不足的短序列,确保保留的运动数据具备充足的时间上下文,保障运动分析与生成的可靠性。
-
运动提取与优化:使用 WHAM 算法从高质量视频片段中回归世界坐标系下的准确 3D 人体运动(即 SMPL 模型参数),作为数据集的基础运动表征;最后采用基于强化学习(RL)的策略 PHC 对运动质量进行优化,进一步提升数据精度。
相较于 HumanML3D、MotionX 等现有运动数据集,HuMo100M 在支撑可控运动生成方面具备三大独特优势,有效弥补了现有数据集的关键短板:
- 结构化部位标注:将人体分为上半身(手臂、肩膀、躯干)与下半身(腿部、臀部、脚部),针对每个部位生成详细运动描述,例如“左臂上举指向周围”“右腿向前伸展”;
- 多来源标注增强:通过 Gemini-1.5-Pro 大模型(结合精心设计的提示词)生成语义准确的部位描述,并整合 PoseScript 工具提升标注语义一致性;同时引入基于姿态编码的规则化描述,捕捉关节间的空间关系(如“左手位于右手下方”“右脚在左膝前方伸展”),为 VLMM 提供细粒度部位控制所需的监督信号。
- Interpolation-based Concatenation:通过三阶段对齐实现无缝拼接——先统一运动序列的方向( orientation alignment ),再进行全局坐标平移对齐( global coordinate alignment ),最后以中立站姿为参考,采用球面线性插值( Slerp )在序列间生成平滑过渡,确保角色在不同动作间回归标准姿态,兼顾连续性与物理合理性;
- Learning-based Concatenation:训练专门的“中间运动预测模型”,通过在训练中遮挡约 50% 的运动序列、让模型学习运动补全,实现不同运动序列间的上下文适配过渡;实际应用中,先通过插值法生成初始关键帧衔接序列,再由学习模型优化过渡效果,结合规则化方法的可靠性与数据驱动方法的适应性。
- 对于从网络视频中提取的噪声或不完整运动数据,VLMM 可通过文本对齐的视觉片段获取�弱监督信号——利用视觉模态包含的环境、物体交互、运动动态等上下文信息,补偿运动估计误差,提升对运动的理解能力;
- 作为统一多模态框架,视觉片段的引入使 VLMM 能直接从视频输入中执行运动估计任务,模仿观察到的人类动作,突破传统“文本驱动运动生成”的局限,拓展模型在实际场景中的应用范围(如视频动作模仿)。
实验
- 文本到运动(T2M):首先在两个经典基准上进行评测:HumanML3D(14,616 段动作,44,970 条文本描述)和 KIT-ML(3,911 段动作,6,278 条描述)。二者均采用 80 % 训练 / 5 % 验证 / 15 % 测试的划分方式。此外,我们从 HuMo100M 中采样 200,000 组高质量动作-文本对,构建大规模测试集 HuMo-T2M,以覆盖比传统基准更丰富的场景。
- 指令到运动(I2M):基于 HuMo100M 构建包含一百万组高质量动作-指令对的综合基准 HuMo-I2M,并保持 80 %/5 %/15 % 的划分比例,用于评估模型对多样化自然语言指令的遵循能力。
- 指令到未见动作(I2U):为了测试泛化能力,从 HuMo100M 中精选 200,000 段在训练阶段从未出现的新颖动作序列,构建 HuMo-Unseen,以严格评估模型生成全新动作模式的能力。
- 指令到部分动作(I2PM):提出专门用于局部控制评估的 HuMo-I2PM 基准,包含 200,000 条带精细解剖区域标注的实例(150,000 测试、50,000 验证),重点评测模型对细粒度身体部位的控制能力。
- 指令到长序列运动(I2LM):为评估长序列生成,利用提出的拼接方法构建 HuMo-I2LM,共 500,000 段拼接后的运动序列,并遵循标准划分比例,重点考察时间一致性与长期运动连贯性。
- 运��动预测与插值(MPI):在标准 AMASS 与 3DPW 之外,我们从 HuMo100M 中提取 200,000 条样本构建 HuMo-MPI。聚焦六个解剖区域(脊柱、手臂、腿部、头部),并排除全局平移与面部表情。
- 动作到运动:采用 UESTC 数据集,遵循上述协议进行以动作为条件的运动生成评估。
- 运动重建:在 HumanML3D、MotionX和 HuMo100M 三个数据集上评测重建能力,以评估模型在运动编码与解码上的质量。
- 运动到文本:使用 HumanML3D 基准评估运动字幕生成能力,考察模型根据运动序列生成描述性文本的表现。