GPT4RoI-Instruction Tuning Large Language Model on Region-of-Interest
论文名称:GPT4RoI: Instruction Tuning Large Language Model on Region-of-Interest
介绍
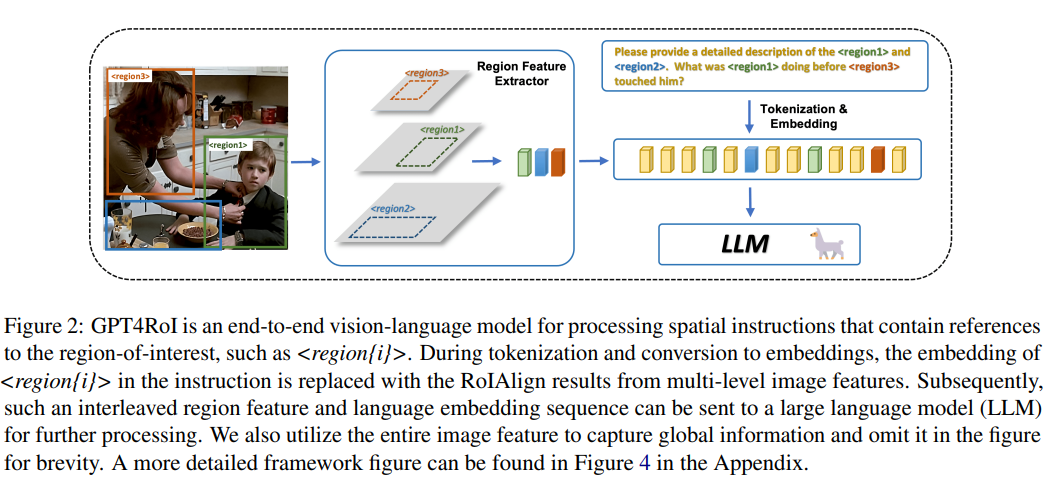
- 视觉指令调整大型语言模型(LLM)在图像 - 文本对上已经实现了通用的视觉 - 语言能力。然而,区域 - 文本对的缺乏限制了它们在细粒度多模态理解方面的进展。 2.在本文中,我们提出了空间指令调整,它在指令中引入了对感兴趣区域(RoI)的引用。在发送到 LLM 之前,引用被 RoI 特征替换,并与语言嵌入交错作为序列。
- 超越语言的交互:用户可以通过语言和绘制边界框与我们的模型交互,灵活调整引用的粒度。
- 多样化的多模态能力:GPT4RoI 可以挖掘每个 RoI 内的多种属性信息,例如颜色、形状、材料、动作等。
- 它可以基于常识对多个 RoI 进行推理。
关键词:spatial instruction learning。
GPT4RoI
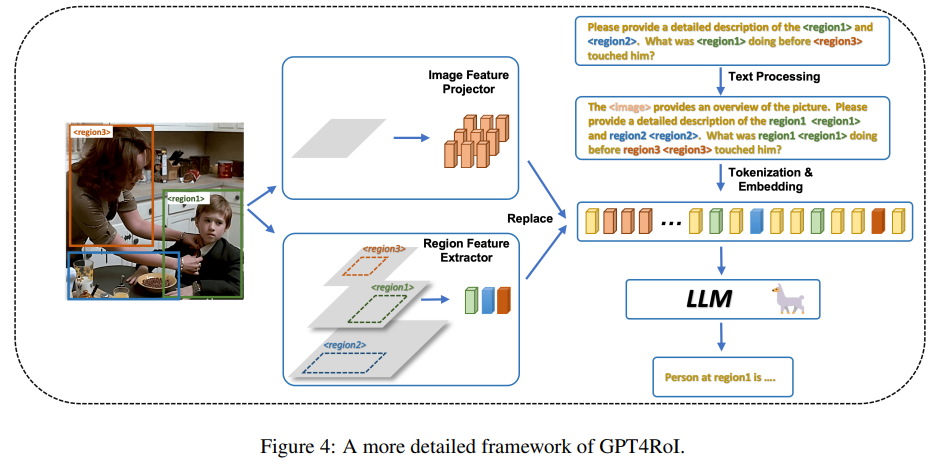
整体由视觉编码器、图像级特征投影器、区域特征提取器和大型语言模型(LLM)组成,实际上还是 LLaVA 架构,这里的区域特征提取器采用了目标检测领域中广泛使用的模块,主要是基于视觉编码器构建了一个多级的特征金字塔,再采用 RoIAlign 根据用户指令中的区域引用在每个级别上提取区域特征,然后融合为一个单一的嵌入(长度为 1 的 Token),直接作为区域表示。在 CLIP 中选择四层特征,再使用五个轻量级的 shuffle 模块。代码如下:
# mlvl_feats 长度为4的列表
def forward(self, mlvl_feats, bboxes):
if mlvl_feats[0].dim() == 3:
h = w = int(math.sqrt(mlvl_feats[0].shape[1]))
assert h == 16
assert w == 16
b, c = mlvl_feats[0].shape[0], mlvl_feats[0].shape[-1]
# reshape回二维
mlvl_feats = [item.reshape(b, h, w, c).permute(0, 3, 1, 2) for item in mlvl_feats]
base_shape = mlvl_feats[0].shape[-2:]
num_level = len(mlvl_feats)
## 插值回原来的大小
to_shape = [(base_shape[0] * 2 ** level, base_shape[1] * 2 ** level) for level in range(num_level)]
to_shape = to_shape[::-1]
for level in range(num_level):
feat = mlvl_feats[level]
shape = to_shape[level]
mlvl_feats[level] = F.interpolate(feat, size=shape, mode='bilinear', align_corners=True)
mlvl_feats = self.mlvl_fuse(mlvl_feats)
return self.roi_align(mlvl_feats, bboxes)
fuse 模块由几个轻量级的卷积组成,forward 如下
def forward(self, inputs, ):
feat_size = [item.shape for item in inputs]
new_inputs = []
for feat, single_feat_size in zip(inputs, feat_size):
# 这里好像是一个常见的操作
coord_feat = self.generate_coordinate(single_feat_size, device=inputs[0].device)
feat = torch.cat([feat, coord_feat], dim=1)
new_inputs.append(feat)
inputs = new_inputs
# 4 个 卷积
inputs = [self.input_conv[lvl](item) for lvl, item in enumerate(inputs)]
# 5 个
for conv_m in self.fuse_convs:
inputs = self._single_shuffle(inputs, [conv_m])
return inputs
shuffle 的操作如下,就是把当前 level 特征图的部分通道和更高/低层特征图的部分通道结合起来,最后再使用卷积;看起来是所有通道交错,最后都会被利用到。
def _single_shuffle(self, inputs, conv_module):
if not isinstance(conv_module, (nn.ModuleList, list)):
conv_module = [conv_module]
for single_conv_m in conv_module:
fused_inputs = []
for fuse_lvl_tuple in self.fuse_lvl_list:
tar_lvl, top_lvl, dow_lvl = fuse_lvl_tuple
tar_input = inputs[tar_lvl]
top_input = inputs[top_lvl]
down_input = inputs[dow_lvl]
remain = tar_input[:, :self.remain_chs]
from_top = top_input[:,
self.remain_chs:][:,
self.shuffle_channles:]
from_top = F.interpolate(from_top.to(torch.float32),
size=tar_input.shape[-2:],
mode='bilinear',
align_corners=True)
from_down = down_input[:, self.remain_chs:][:, :self.
shuffle_channles]
from_down = F.interpolate(from_down.to(torch.float32),
size=tar_input.shape[-2:],
mode='bilinear',
align_corners=True)
fused_inputs.append(
torch.cat([remain, from_top, from_down], dim=1))
fused_inputs = [single_conv_m(item) for item in fused_inputs]
inputs = fused_inputs
return inputs
特征提取模块用了 RoIAlign ,搞不懂啊,得到相应的特征之后再替换 <bbox>:
if spi_feat is not None:
spi_embeds = torch.zeros_like(cur_new_input_embeds)
spi_mask = (cur_input_ids ==
self.tokenizer.convert_tokens_to_ids(
['`<bbox>'])[0])
# 替换到 spi_embeds 上
spi_embeds[spi_mask] = spi_feat.to(spi_embeds.dtype)
# 再替换到input_embeds上
cur_new_input_embeds = cur_new_input_embeds * (
~spi_mask).to(
cur_input_embeds.dtype)[:, None] + spi_embeds
Region Token
定义了一个特殊的 token <region{i}>,作为占位符,在分词和嵌入之后被对应的区域特征替换。并且在每个指令前添加一个特殊的前缀提示:“The <image> provides an overview of the picture”,这里的 <image> 是一个特殊的 token 占位符,表示图像的全局信息。
训练
使用 next-token prediction loss,模型预测下一个 token;同样是两阶段训练:
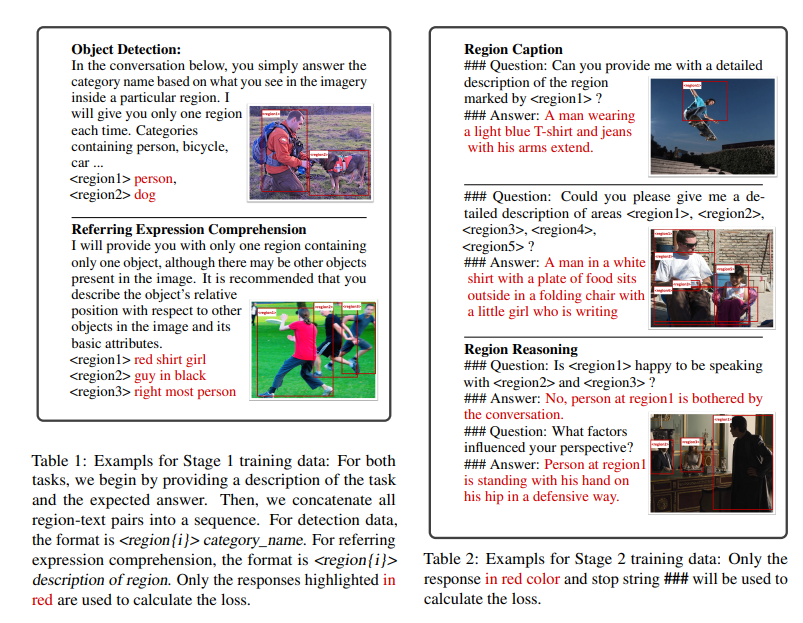
- 第一阶段使用包含颜色、位置和类别描述的简单区域 - 文本对,目的是对齐区域特征和 LLM 中的 word embedding;这里直接加载了 LLaVA 在 initial stage(第一阶段?)训练之后的权重,只训练区域特征提取器。这一阶段的数据来自于常规检测数据集和具有简短表达形式(通常在五个单词以内)指代检测数据集,具体来说,COCO、RefCOCO、RefCOCO+;具体训练中,对于 COCO 数据集,首先在提示中解释任务,然后进行单字(一个单词)区域标题预测,对于后两�种,同样给出人物定义,但是训练模型生成区域的基本属性描述,只有上图中红色部分用于计算损失。
- 第二阶段则处理更复杂的概念,如动作、关系和常识推理,保持图像编码器冻结,旨在使得模型能够准确跟随用户指令并解决复杂的单/多区域理解任务;单区域标题从 VG 和 RefCOCOg 构建,多区域标题从 Flicker30K 构建。为了模拟用户指令,为每个标题任务创建了 20 个问题;区域推理人物,从视觉常识推理(VCR)构建。同时为了提高模型在多轮对话中的能力和生成更像人类的回应,使用了 LLaVA150K 数据集,使用 LVIS 检测器,从每张图片中提取多达 100 个检测框,这些框以“
<region{i}>可能包含一个 class_name”的形式与用户指令连接,LLaVA150K 显著提高了模型的多轮对话能力。
局限性
主要在与指令混淆和区域内细粒度信息的错误识别。
模型架构
224 的图像尺寸过小,过大的输入则会带来更高的计算成本。
区域级别指令
实际使用中用户可能会就任意数量的区域提出问题,而现有的数据不能满足。
交互模型
目前只支持自然语言和边界框,可以引入更多交互方式,如点击、涂鸦和基于图像的搜索等。
Other Region Reference Format
使用文本坐标或额外位置标记,需要通过在大量数据集上训练,将大量的位置标记与图像中的位置对齐;但这实际上是很简单的操作,可以通过外部的目标检测器实现,这也是本文的动机,GPT4RoI 需要的数据量少得多,并且允许快速适应特定领域的特定问题;缺点是框架看起来不够优雅,其假定了输入包含所有要分析的区域。
建模几何属性具有一定挑战性,检测领域使用 L1 或 IOU loss 可以自然地处理 bbox 这样的几何约束,而将其加入使用交叉熵的 next-token prediction task 存在挑战。