朴素 GEMM
目前,在训练和推理大型深度学习模型期间,矩阵乘法可能是最重要的算法之一。因此,从头开始编写一个高性能的 CUDA SGEMM(单精度=32 位)究竟需要多少工作呢?我将从一个简单的内核开始,逐步应用优化,直到我们的性能接近 cuBLAS(NVIDIA 的官方矩阵库)。
在 CUDA 编程模型中,计算按照三级层次进行排序。每次调用 CUDA 内核都会创建一个新的网格,该网格由多个块组成。每个块由最多 1024 个单独的线程组成。这些常数可以在 CUDA 编程指南中查找。处于同一块内的线程可以访问相同的共享内存区域(SMEM)。
块中的线程数可以使用一个通常称为 blockDim 的变量进行配置,它是一个由三个整数组成的向量。该向量的条目指定了 blockDim.x、blockDim.y 和 blockDim.z 的大小,如下图所示:
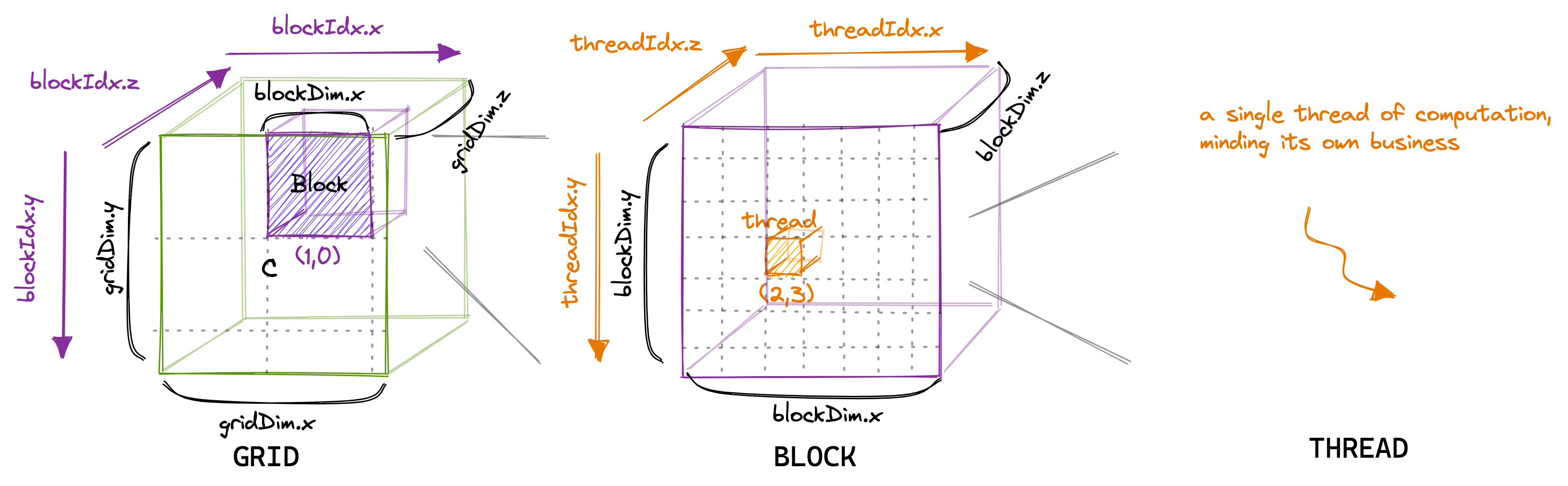
同样,网格中的块数可以使用 gridDim 变量进行配置。当我们从主机启动一个新的内核时,它会创建一个包含按照指定方式排列的块和线程的单一网格。重要的是要记住,我们刚刚讨论的线程层次结构主要涉及程序的正确性。然而,对于程序的性能,正如我们将在后面看到的那样,将同一块内的所有线程看作相等并不是一个好主意。
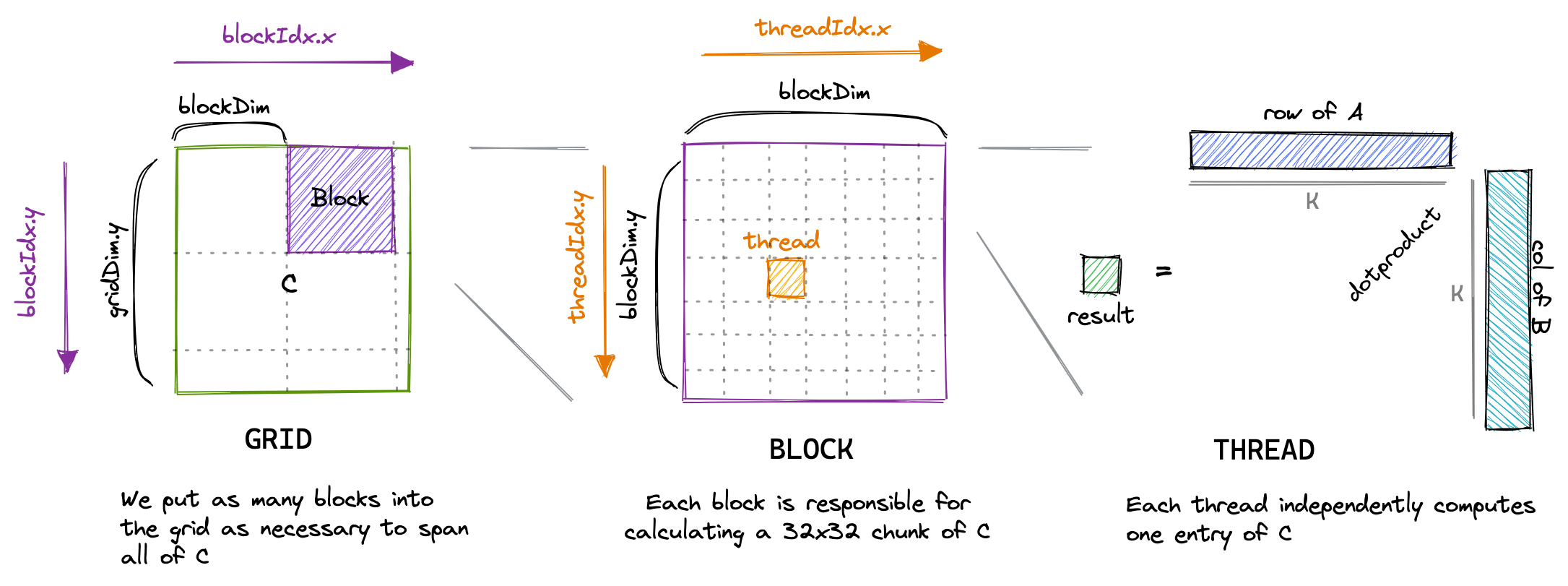
对于我们的第一个内核,我们将使用 grid、block 和 thread 的层次结构,每个线程计算结果矩阵 C 中的一个元素。该线程将计算矩阵 A 相应行和矩阵 B 相应列的点积,并将结果写入矩阵 C。由于矩阵 C 的每个位置仅由一个线程写入,我们无需进行同步。我们将以以下方式启动内核:
// create as many blocks as necessary to map all of C
dim3 gridDim(CEIL_DIV(M, 32), CEIL_DIV(N, 32), 1);
// 32 * 32 = 1024 thread per block
dim3 blockDim(32, 32, 1);
// launch the asynchronous execution of the kernel on the device
// The function call returns immediately on the host
sgemm_naive<<<gridDim, blockDim>>>(M, N, K, alpha, A, B, beta, C);
注意这里除以 32 是因为 block 大小为 32,该 kernel 为输出结果的每一个位置设置一个线程用于计算。
实际上就是将一个输出矩阵(也就是一个 grid)分割为大小为 32 的窗口,如下图所示,每个 block 负责一个窗口内结果的计算。
计算过程中,首先需要得到某一个 block 中某个线程相对与整个 grid 的 绝对坐标:
- x 的计算要用到块内 x 坐标(threadIdx.x),以及之前 block 的长度 (blockDim.x * blockIdx.x,前者表示一个 block 的长度即 32,后者表示是 x 方向的第几个 block);
- y 的计算同理。
得到绝对坐标后,计算便直接根据矩阵相乘的流程即可。
更新:看起来并不是相对与结果矩阵的绝对坐标,如下图所示,似乎有一个转置
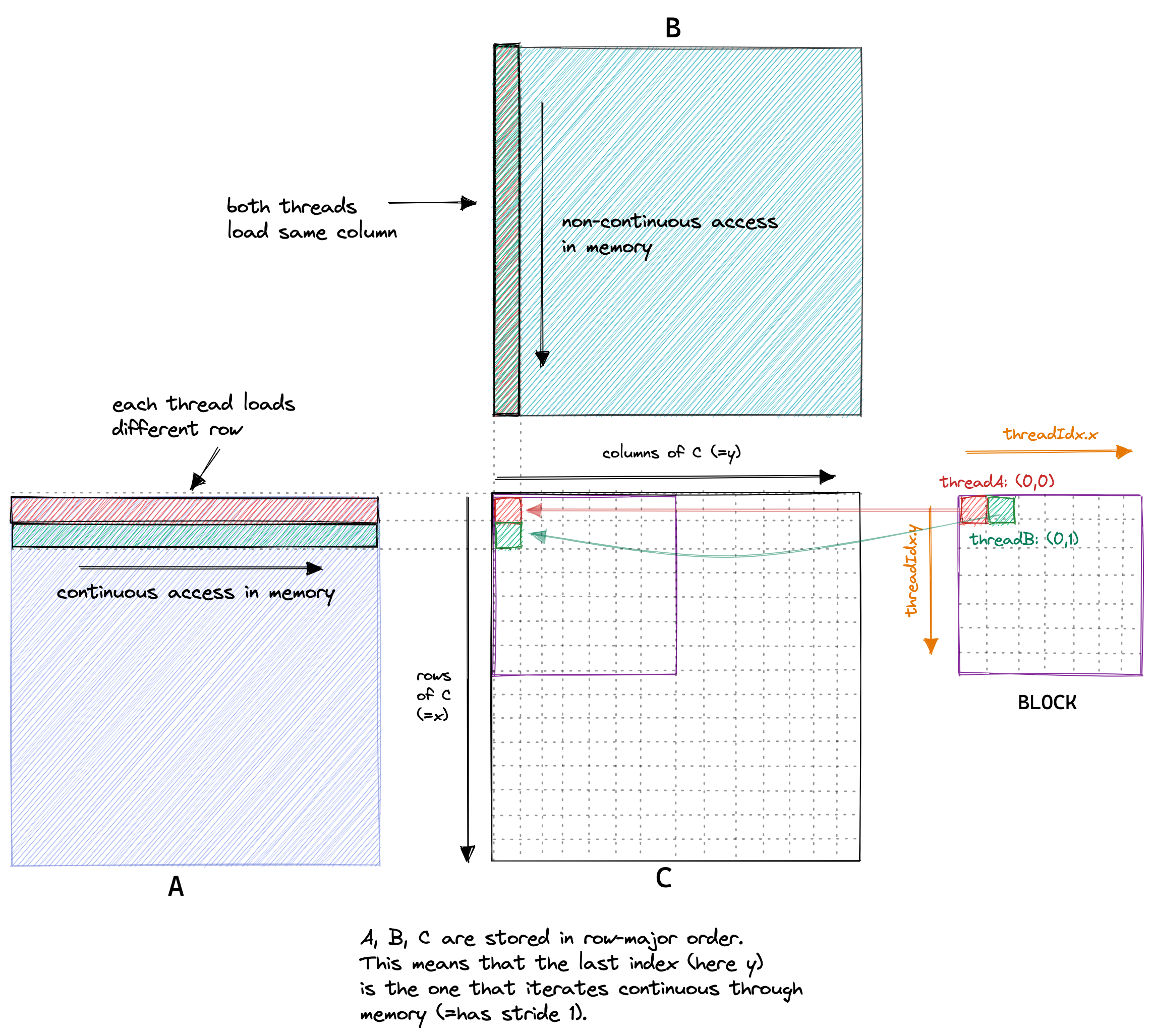
首先明确 x, y 是线程在 grid 中的绝对坐标,分别表示横向和纵向,但从下面的写出代码中可以看出,x 应该是表示行号,然而实际上 x 表示 grid 中的列号,因此 grid 中的线程与结果矩阵应该有一个转置的对应关系。
C[x * N + y] = alpha * tmp + beta * C[x * N + y];
而如果线程坐标就是其负责数据坐标,这样便可以直接全局内存合并,因此只需要调换 x 和 y 的值,并且更改判断条件即可,具体见第二章。
直接调换顺序应该是可行的,但是经过测试部分尺寸会有问题,不懂为啥😢。
下图可视化了我们的内核的执行方式:
CUDA 代码是从单线程的视角编写的。在内核代码中,我们使用 blockIdx 和 threadIdx。这些变量的值会根据访问它们的线程而异。在我们的例子中,threadIdx.x 和 threadIdx.y 将根据线程在网格中的位置从 0 到 31 变化。同样,blockIdx.x 和 blockIdx.y 也将根据线程块在网格中的位置从 0 到 CEIL_DIV(N, 32) 或 CEIL_DIV(M, 32) 变化。
__global__ void sgemm_naive(int M, int N, int K, float alpha, const float *A,
const float *B, float beta, float *C) {
// compute position in C that this thread is responsible for
const uint x = blockIdx.x * blockDim.x + threadIdx.x;
const uint y = blockIdx.y * blockDim.y + threadIdx.y;
// `if` condition is necessary for when M or N aren't multiples of 32.
if (x < M && y < N) {
float tmp = 0.0;
for (int i = 0; i < K; ++i) {
tmp += A[x * K + i] * B[i * N + y];
}
// C = α*(A@B)+β*C
C[x * N + y] = alpha * tmp + beta * C[x * N + y];
}
}
这个内核在 A6000 GPU 上处理三个 4092 的 fp32 矩阵大约需要 0.5 秒。